


1 / 5
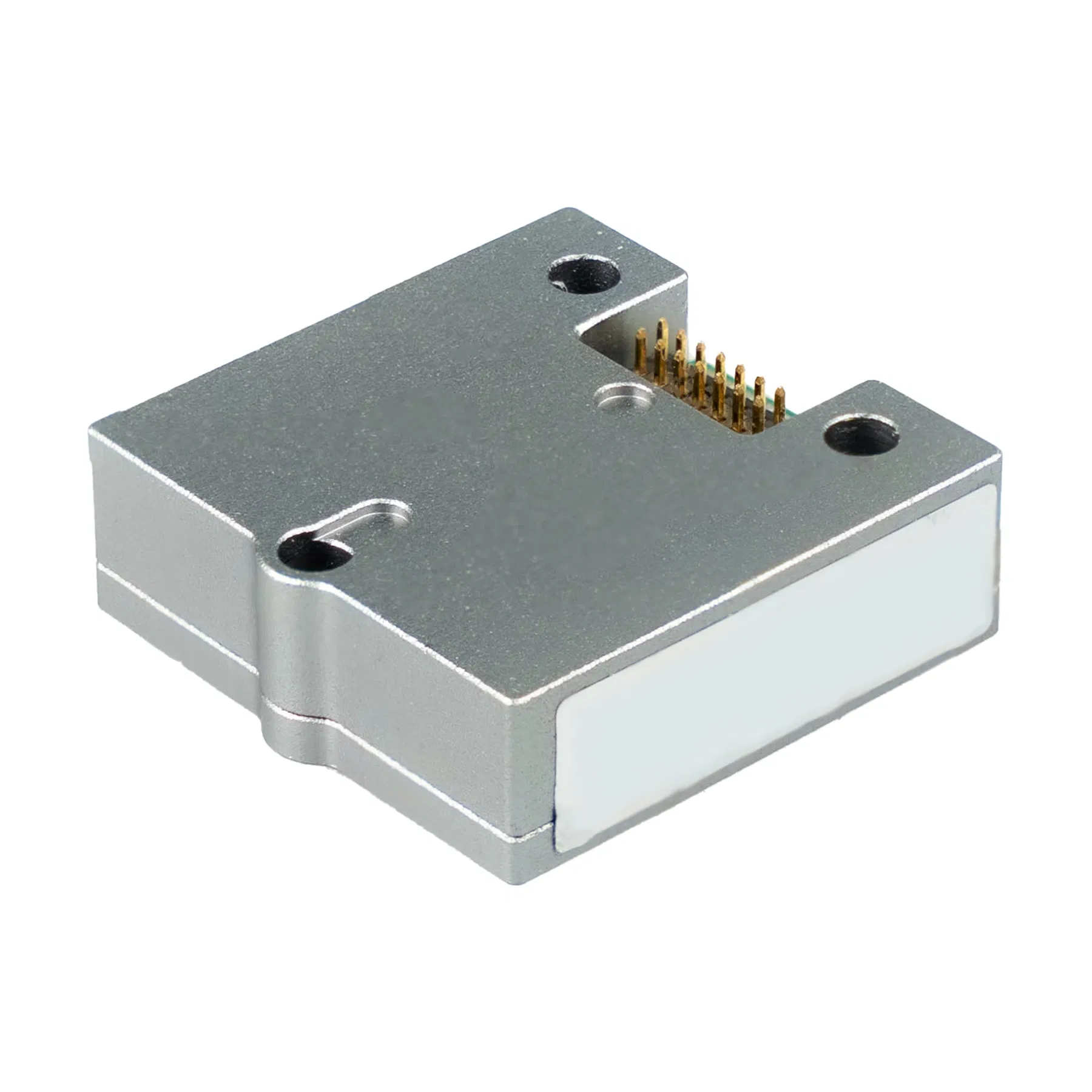
The IMU80 is a high-performance, low-cost Industrial Inertial Measurement Unit (IMU) designed for precise navigation and motion sensing. This rugged 6-axis system provides high-accuracy yaw, pitch, and roll data, integrating MEMS-based sensors with an extended Kalman filter algorithm to deliver superior cost-effective performance for industrial applications.

| Parameter | Min | Typical | Max |
|---|---|---|---|
| Gyroscopes | |||
| Range | -400°/s | - | +400°/s |
| Bias Instability | 3°/h | 4°/h | 5°/h |
| Initial Bias Error | 0.08°/s | 0.1°/s | 0.2°/s |
| Resolution | - | 0.01°/s | - |
| Random Walk | 0.2º/√hr | 0.3º/√hr | 0.5º/√hr |
| Accelerometers | |||
| Range (X, Y, Z) | -6g | - | +6g |
| Bias Instability | 5μg | 10μg | 15μg |
| Initial Bias Error | 3mg | 4mg | 5mg |
| Random Walk | 0.03m/s/√hr | 0.05m/s/√hr | 0.07m/s/√hr |
| Electrical & Physical | |||
| Input Power Supply | 3.3VDC | ||
| Power Consumption | <0.15W | ||
| Interface | SPI / UART (optional) | ||
| Housing Material | Aluminum | ||
| Size | 23.4 x 22.4 x 8mm | ||
The IMU80 industrial-grade sensor is optimized for environment-independent tracking, making it a core technology for safety and sensor fusion in various fields:



Every IMU80 unit undergoes a full calibration process. It offers performance similar to ADIS16460 but with enhanced stability and responsiveness for industrial needs.

Produced with a 12-step strict quality control procedure, ensuring each sensor maintains top-level quality and reliability in harsh environments.

With over 200 customers worldwide, the IMU80 is a proven solution for machine control, platform stabilization, and antenna pointing.